Dans un solide soumis à plusieurs sollicitations, la réponse ne se résume plus à une simple traction dans un axe. La loi de Hooke généralisée permet de relier contraintes et déformations dans un cadre local, linéaire et réversible, ce qui la rend utile dès qu’un matériau travaille en 3D ou que son comportement dépend de la direction. Je vais montrer comment lire cette relation tensorielle, pourquoi le cas isotrope reste le plus courant, et où le modèle cesse d’être suffisant.
Les repères essentiels à garder en tête
- La relation générale s’écrit entre le tenseur des contraintes et celui des déformations.
- Elle suppose des petites déformations et un comportement élastique réversible.
- En matériau isotrope, deux paramètres suffisent souvent: E et ν, ou λ et μ.
- En matériau anisotrope, la direction compte et la matrice 6×6 devient la bonne écriture pratique.
- La loi décrit la réponse locale du matériau, pas automatiquement la forme finale d’une structure.
Pourquoi l’élasticité linéaire a besoin d’un cadre plus large
Je distingue toujours la loi du matériau de la réponse de la pièce. Une poutre, une plaque ou une coque ne “voient” pas la même sollicitation partout: traction, compression, cisaillement et flexion peuvent se superposer, parfois dans la même zone.
C’est précisément pour cela qu’une formule scalaire du type σ = E ε devient insuffisante. Elle reste correcte pour un essai uniaxial simple, mais elle ne suffit plus dès qu’il faut prendre en compte plusieurs directions d’effort ou la géométrie du solide.
- la traction et la compression dans une direction donnée;
- le cisaillement, qui déforme l’angle entre deux faces;
- les combinaisons de ces effets dans les structures réelles;
- les matériaux dont la rigidité change selon l’orientation des fibres ou des cristaux.
La généralisation n’est donc pas un raffinement décoratif: elle sert à garder la physique juste quand le problème sort du cas 1D. La question devient alors simple: quelles grandeurs faut-il vraiment relier pour décrire proprement l’état du solide?
Le passage des forces aux tenseurs
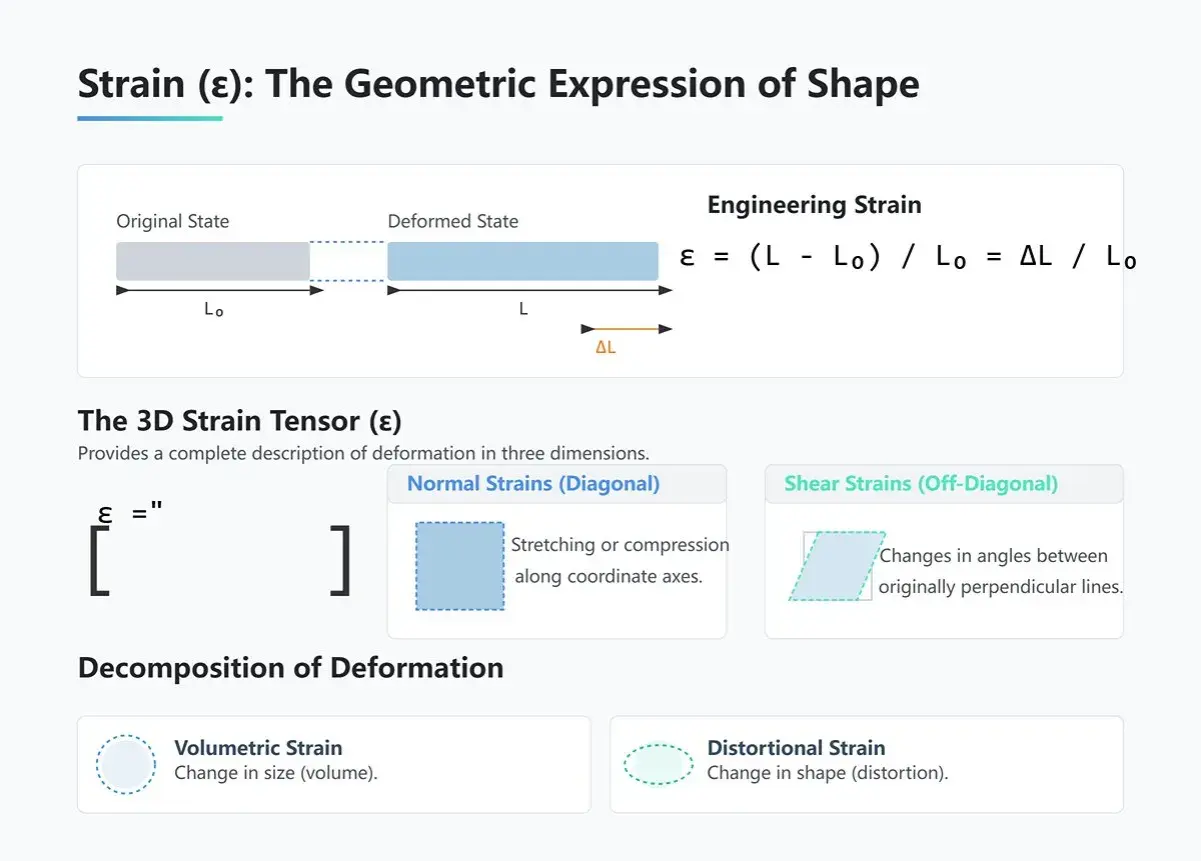
Dans le cadre des petites perturbations, on décrit l’état mécanique d’un point du solide avec deux objets: le tenseur des contraintes σ et le tenseur des déformations ε. Le premier traduit les efforts internes, le second la déformation locale réellement subie.
La forme la plus utile de la relation est alors très compacte, même si elle cache beaucoup de structure:
σij = Cijkl εkl.
Le tenseur C, d’ordre 4, joue le rôle de “matrice de rigidité” du matériau. Il dit combien une composante de déformation produit de contrainte dans une direction donnée. Les symétries du problème réduisent fortement le nombre de coefficients indépendants, et c’est là que la notation de Voigt devient très utile pour les calculs.
Les déformations petites s’écrivent à partir du déplacement u sous la forme:
εij = 1/2 (∂ui/∂xj + ∂uj/∂xi).
Cette écriture rappelle un point important: la loi ne dépend pas de la rotation rigide du solide, seulement de sa déformation réelle. Je trouve que c’est souvent le détail qui évite les plus grosses erreurs de modélisation.
Dans les cas usuels, les tenseurs des contraintes et des déformations sont symétriques, ce qui laisse six composantes indépendantes pour chacun. On passe alors naturellement à une écriture matricielle 6×6, plus pratique pour le calcul numérique et pour la comparaison des matériaux. Quand le matériau est identique dans toutes les directions, cette matrice se simplifie fortement.
Quand deux constantes suffisent encore
Si le matériau est isotrope, son comportement ne change pas quand on le tourne. C’est le cas le plus confortable pour un ingénieur, parce que deux paramètres bien choisis résument déjà l’essentiel: souvent le module de Young E et le coefficient de Poisson ν.
On peut écrire la loi sous une forme très compacte:
σij = λ tr(ε) δij + 2μ εij.
λ et μ sont les constantes de Lamé. Le symbole tr(ε) désigne la trace du tenseur des déformations, c’est-à-dire la somme des composantes diagonales. Le symbole δij est le delta de Kronecker, qui “sélectionne” la bonne direction dans l’écriture tensorielle.
| Paramètre | Rôle physique | Lecture rapide |
|---|---|---|
| E | Rigidité en traction | Plus E est grand, moins le matériau s’allonge sous une même contrainte |
| ν | Contraction latérale | Plus ν est élevé, plus la pièce se resserre en largeur quand on l’étire |
| G = μ | Résistance au cisaillement | Il commande la facilité avec laquelle les couches glissent les unes sur les autres |
| λ | Couplage volumique | Utile dans l’écriture tensorielle et dans les équations de milieu continu |
Dans ce cadre, on retrouve des relations très concrètes. En traction simple selon x, on obtient par exemple εxx = σxx / E, avec en même temps des contractions latérales εyy = εzz = -ν σxx / E. En cisaillement pur, la contrainte tangentielle et la déformation de glissement sont liées par τ = G γ.
C’est exactement ce que beaucoup de lecteurs cherchent derrière cette relation: une façon de passer d’un essai simple à une description 3D cohérente. Le cas isotrope reste donc la base, même quand le matériau réel est un peu plus complexe.
Ce qui change dès que le matériau devient directionnel
Dès qu’un matériau n’a plus la même réponse dans toutes les directions, on sort du cadre isotrope. C’est le cas des composites à fibres, du bois, de nombreux cristaux ou encore de certaines roches. Ici, la direction de sollicitation compte autant que l’intensité de l’effort.
Dans ce cas, on écrit souvent la loi sous forme matricielle, avec une matrice de rigidité 6×6 ou, de manière équivalente, une matrice de souplesse. La notation de Voigt n’est pas un simple confort typographique: elle rend le problème calculable sur ordinateur et lisible dans les logiciels de mécanique.
On peut aussi écrire la forme inverse ε = Sσ, où S est la matrice de souplesse, c’est-à-dire l’inverse de la matrice de rigidité C. Je l’utilise souvent comme repère mental: C décrit ce que le matériau “résiste” à faire, S décrit ce qu’il “laisse” faire.
| Type de matériau | Constantes indépendantes | Exemple typique | Ce que cela implique |
|---|---|---|---|
| Isotrope | 2 | Acier à l’échelle macroscopique, verre | Même réponse dans toutes les directions |
| Transversalement isotrope | 5 | Composite unidirectionnel, certaines roches stratifiées | Une direction privilégiée, mais une symétrie autour d’un axe |
| Orthotrope | 9 | Bois, stratifié composite | Trois axes principaux distincts |
| Anisotrope général | 21 | Cas cristallin le plus général | Le comportement dépend fortement de l’orientation |
Le point pratique à retenir est simple: plus la symétrie du matériau est faible, plus le nombre de constantes grimpe. En revanche, il ne faut pas choisir le modèle le plus compliqué par réflexe; si une symétrie existe, elle doit être exploitée, sinon le calcul devient lourd pour rien.
Autre nuance utile: selon les conventions, les composantes de cisaillement dans la matrice ne s’écrivent pas toutes de la même façon. L’important est de rester cohérent entre la définition des vecteurs de contraintes, des déformations et des constantes élastiques.
Comment l’exploiter dans un calcul concret
Quand je lis une relation d’élasticité, je commence par trois vérifications: petites déformations, réversibilité et symétrie du matériau. Sans ces trois points, la loi risque d’être utilisée au mauvais endroit.
- Identifier le régime de chargement: traction simple, cisaillement, flexion, pression ou combinaison d’efforts.
- Choisir la bonne famille de matériau: isotrope, orthotrope ou anisotrope plus général.
- Renseigner les constantes pertinentes à partir d’essais ou de fiches matériau.
- Écrire la loi en forme tensorielle ou en notation de Voigt selon le calcul visé.
- Vérifier ensuite l’équilibre global de la pièce, car une bonne loi locale n’empêche pas une mauvaise géométrie.
En éléments finis, cette loi intervient localement, point par point, dans chaque élément. C’est très puissant, mais cela ne veut pas dire que tout devient linéaire: une structure peut rester limitée par le flambement, la géométrie ou les conditions d’appui, même si le matériau, lui, reste élastique.
C’est là que beaucoup de débutants se trompent: ils confondent un matériau linéaire avec une structure linéaire. Les deux notions ne coïncident pas toujours.
Les limites du modèle qu’il faut respecter
La formule fonctionne bien tant que l’on reste dans le domaine élastique linéaire. Dès qu’un de ces points change, il faut un autre modèle.
- Plasticité si la déformation devient permanente après décharge.
- Grandes déformations si les rotations ou les allongements ne sont plus petits.
- Viscoélasticité si le temps ou la vitesse de chargement modifient la réponse.
- Endommagement si des microfissures ou de la rupture partielle apparaissent.
- Effets thermiques si la température change sensiblement la raideur.
- Hyperélasticité pour certains élastomères quand les déformations restent réversibles mais deviennent grandes.
Je préfère être net sur ce point: cette relation n’est pas une loi “universelle”, c’est une excellente approximation locale. Elle est très solide tant qu’on ne lui demande pas de décrire ce qu’elle n’est pas faite pour décrire.
Les réflexes qui évitent les contresens
Si je devais résumer la lecture correcte de cette loi en trois réflexes, je garderais ceux-ci:
- penser d’abord au point local du matériau, pas à la pièce entière;
- vérifier la symétrie et le régime de petites perturbations;
- choisir une écriture adaptée au matériau: formule compacte pour l’isotrope, matrice 6×6 pour les cas plus riches.
Autrement dit, cette loi ne sert pas seulement à “faire des calculs de plus”: elle fournit le langage commun entre l’expérience, les modèles de matériau et les outils de simulation. C’est pour cela qu’elle reste une base très utile dès qu’on veut comprendre un solide sans le réduire à un simple ressort.